In the landscape of modern electronics, few protocols are as pervasive yet as invisible as the CAN bus. If you have ever wondered how your car knows exactly when to deploy an airbag, how a robotic arm in a factory moves with sub-millimeter precision, or how an airplane coordinates its flight control surfaces, you are looking at the work of the Controller Area Network.
But what does CAN bus stand for, and why does it remain the gold standard for communication in high-stakes environments? CAN stands for Controller Area Network, and the “bus” refers to the shared communication path that connects all the electronic components within a system. Developed in an era when the complexity of wiring was threatening to overwhelm mechanical design, the CAN bus revolutionized the way microcontrollers talk to one another.
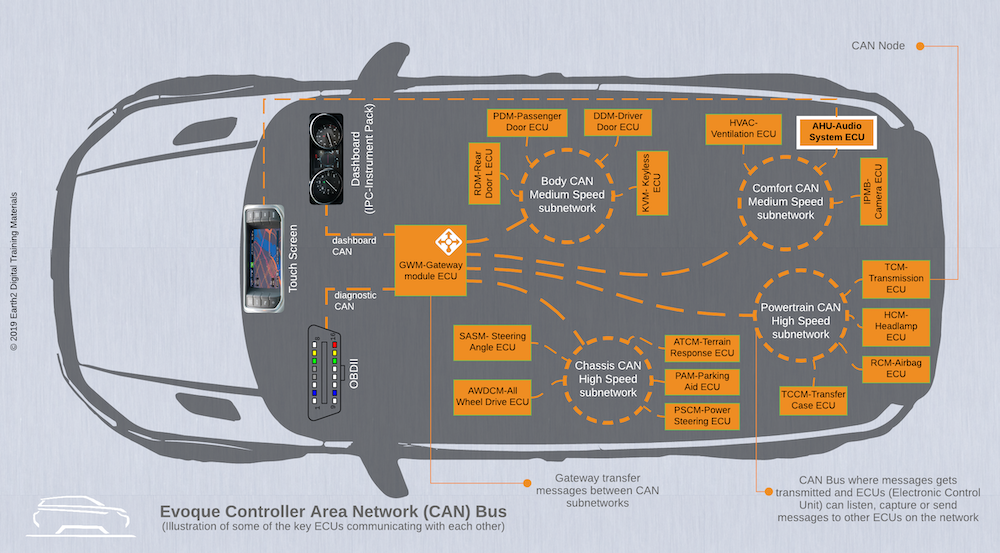
Understanding the Controller Area Network (CAN) Architecture
To appreciate the genius of the CAN bus, one must first understand the problem it was designed to solve. Before its inception, if an electronic control unit (ECU) needed to share data with another, they required a direct, point-to-point wire connection. As vehicles and machines became more “intelligent,” the sheer volume of copper wiring required became heavy, expensive, and prone to failure.
How CAN Bus Works: The Message-Based Approach
Unlike a traditional network where data is sent to a specific IP address or a specific “node,” the CAN bus operates on a “broadcast” or message-based protocol. This means that every device on the network (referred to as a node) “hears” every message sent across the bus.
Each message is assigned a unique identifier. The nodes on the network are programmed to look for specific identifiers relevant to their function. For example, the dashboard display might ignore messages about fuel injection timing but will instantly capture and process messages regarding engine temperature. This decentralized approach allows for incredible flexibility; new nodes can be added to the system without necessitating a complete overhaul of the network’s wiring or software logic.
The Physical Layer: Wires, Nodes, and Termination
Physically, a CAN bus consists of a twisted pair of wires: CAN High (CANH) and CAN Low (CANL). This design utilizes differential signaling, a technique where the system looks at the voltage difference between the two wires rather than the absolute voltage on a single wire.
This is a critical feature for digital security and reliability in “noisy” electrical environments. In a factory or an engine bay, electromagnetic interference (EMI) is rampant. Because the two wires are twisted together, a spike in interference usually affects both wires equally. Since the CAN protocol only cares about the difference between the wires, the noise is effectively canceled out. To prevent signal reflection—which can cause data corruption—the ends of the bus are typically capped with 120-ohm termination resistors.
Protocol Efficiency and Error Handling
One of the most robust features of the CAN architecture is its method of “non-destructive bitwise arbitration.” In simpler terms, this is how the system decides which message gets through first when two nodes try to talk at the exact same time.
Each message has a priority based on its ID. Lower numerical IDs have higher priority. If the brake system and the window-roll-down motor both send a signal simultaneously, the bus automatically allows the brake signal to pass while the window signal waits for the next available slot. This ensures that mission-critical data always takes precedence, a fundamental requirement for safety-tech applications.
Why CAN Bus is the Backbone of Automotive Technology
While the CAN bus is used in many industries today, its origins and its most famous applications are firmly rooted in the automotive sector. Invented by Robert Bosch GmbH in the mid-1980s, it was first implemented in production vehicles to manage the increasing electronic complexity of high-end cars.
Reducing Wiring Complexity
Imagine a modern vehicle without a CAN bus. Every sensor—the brake sensor, the throttle position, the seatbelt tensioner, the climate control—would need its own dedicated set of wires running to a central computer. This would result in miles of cabling, adding hundreds of pounds to the vehicle’s weight and creating thousands of potential points of failure.
By using the Controller Area Network, automotive engineers can connect dozens of ECUs to a single “backbone.” This reduction in “wiring harness” mass not only improves fuel efficiency by reducing weight but also simplifies the manufacturing process and makes the vehicle much easier to service.
Real-Time Data Processing in Modern Vehicles
In the world of technology, “real-time” isn’t just a buzzword; it’s a requirement. If a car’s stability control system detects a skid, it needs to pulse the brakes in milliseconds. The CAN bus provides the high-speed, low-latency environment necessary for this.
The protocol allows for speeds up to 1 Mbps (and even higher with newer iterations), which is more than enough for the rapid-fire exchange of sensor data. Because the protocol handles error checking and re-transmission automatically at the hardware level, the software developers can focus on the logic of the vehicle’s behavior rather than worrying about whether a data packet was lost in transit.
Diagnostics and the OBD-II Connection
If you have ever taken your car to a mechanic and seen them plug a scanner into a port under the dashboard, you have seen the CAN bus in action. That port is the OBD-II (On-Board Diagnostics) port.

The OBD-II standard primarily uses the CAN bus protocol to communicate. When a “Check Engine” light comes on, the engine control module stores an error code and broadcasts it over the CAN bus. The diagnostic tool simply taps into this network, requests the data, and displays the specific fault. This universal access point is a cornerstone of modern automotive maintenance and digital diagnostics.
Beyond Cars: CAN Bus in Industrial and Medical Tech
While its name is synonymous with cars, the reliability and noise-resistance of the CAN bus have made it a favorite in other demanding technological sectors.
Industrial Automation and Robotics
In a modern smart factory, robots and conveyor systems must work in perfect synchronization. The CANopen protocol, which is built on top of the standard CAN hardware layer, is widely used in industrial automation.
In robotics, the CAN bus allows a central controller to send movement commands to multiple joints simultaneously. Because the bus is resistant to the electrical noise generated by high-voltage electric motors, it ensures that the robot doesn’t receive “ghost” commands or lose its positioning data, which is vital for both safety and precision.
Aerospace and Maritime Applications
In aerospace, weight is the enemy of performance. The weight-saving properties of the CAN bus make it ideal for unmanned aerial vehicles (UAVs) and sophisticated avionics systems. Modern aircraft use a variant of the CAN bus to manage everything from flight surface actuators to cabin environmental controls. Similarly, in maritime tech, the NMEA 2000 standard—used for marine electronics—is based entirely on CAN bus technology, allowing GPS, sonar, and engine data to share a single network across a ship.
Medical Devices and High-Reliability Systems
Reliability is paramount in medical technology. Devices like prosthetic limbs, sophisticated imaging machines, and laboratory automation equipment utilize CAN bus for internal communication. The protocol’s built-in error detection ensures that if a data packet is corrupted—perhaps by a piece of high-energy medical equipment nearby—the system knows instantly and can prevent the device from acting on incorrect information.
The Evolution of Connectivity: CAN FD and the Future of IoT
As we move further into the era of autonomous driving, artificial intelligence, and the Internet of Things (IoT), the original CAN standard has begun to reach its limits. This has led to the next generation of the protocol.
CAN FD: Meeting the Demand for High-Speed Data
CAN FD (Flexible Data-rate) is the high-performance successor to the original CAN protocol. As vehicles become “computers on wheels,” the amount of data being generated by cameras, LiDAR, and radar has skyrocketed.
CAN FD addresses this by allowing for larger data payloads (up to 64 bytes compared to the original 8 bytes) and faster transmission speeds. This allows for more complex sensor fusion, where data from multiple sources is combined to help an AI make driving decisions in real-time. It maintains backward compatibility with original CAN hardware, making it an easy upgrade path for manufacturers.
Security Challenges in the Age of Connected Devices
As machines become more connected to the internet, the “air-gapped” security of the CAN bus has come under scrutiny. Originally, CAN was designed for closed systems where physical access was required to intercept data. Today, with vehicles connected to Wi-Fi and cellular networks, cybersecurity has become a major focus for tech researchers.
The tech industry is now developing “Secure CAN” protocols that add layers of encryption and authentication to the bus. This ensures that even if a hacker gains remote access to a car’s infotainment system, they cannot send unauthorized commands to critical systems like steering or braking.
Integration with AI and Autonomous Systems
The future of the CAN bus lies in its integration with higher-level computing. In autonomous vehicles, the CAN bus acts as the “reflex” system, handling the immediate, physical tasks, while a high-power AI processor acts as the “brain.”
We are seeing a trend where CAN bus data is fed directly into machine learning models to predict mechanical failure before it happens (predictive maintenance). By analyzing the minute fluctuations in data patterns on the bus, AI can identify that a fuel pump is beginning to degrade weeks before it actually fails.

Conclusion: The Enduring Legacy of the Controller Area Network
What does CAN bus stand for? On the surface, it stands for Controller Area Network. But in the broader context of technology, it stands for reliability, efficiency, and elegant design.
It is a testament to the protocol’s robustness that a technology developed in the 1980s remains not only relevant but essential in the age of AI and electric vehicles. By providing a rugged, noise-resistant, and high-speed communication backbone, the CAN bus has enabled the digital transformation of the physical world. Whether it is keeping you safe on the road, automating a factory, or powering the next generation of medical breakthroughs, the CAN bus remains the silent, essential nervous system of modern technology.
aViewFromTheCave is a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for sites to earn advertising fees by advertising and linking to Amazon.com. Amazon, the Amazon logo, AmazonSupply, and the AmazonSupply logo are trademarks of Amazon.com, Inc. or its affiliates. As an Amazon Associate we earn affiliate commissions from qualifying purchases.