Personal Watercraft (PWC) represent a pinnacle of marine engineering, blending high-performance hydrodynamics with sophisticated electronic control systems. Unlike traditional outboard or inboard boats that rely on rudders or propeller direction, a PWC utilizes a unique jet propulsion system. To the uninitiated, steering a PWC might seem as simple as turning a set of handlebars. However, beneath the fiberglass hull lies a complex synergy of hardware and software designed to manage high-speed maneuvers in a fluid environment.
Understanding what is needed for steering control on a PWC requires a deep dive into the evolution of marine technology, from the mechanical linkages of the past to the intelligent, fly-by-wire systems of today.
1. The Core Hardware: Thrust Vectoring and Nozzle Dynamics
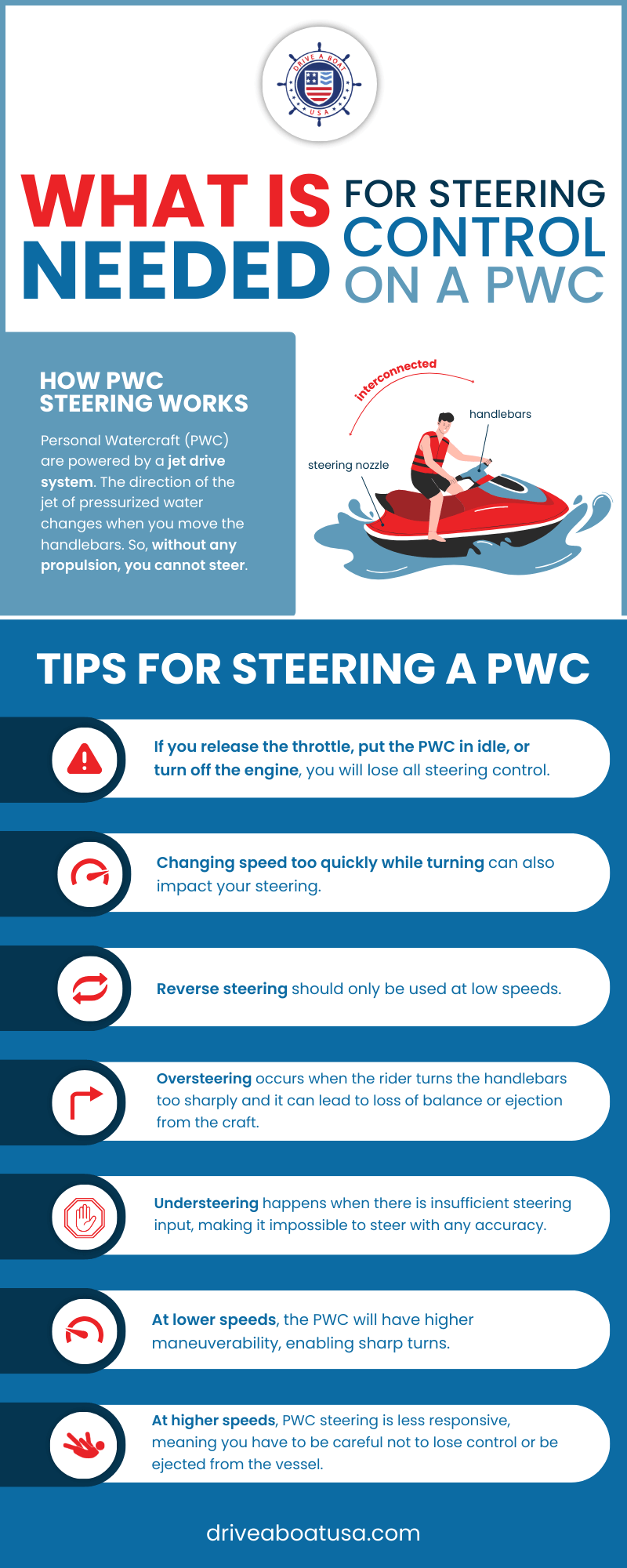
At its most fundamental level, the steering of a PWC is predicated on the principle of thrust vectoring. Because a PWC does not have a rudder, it cannot change direction without the movement of water. This creates a unique technological challenge: the vehicle is only steerable when the engine is generating thrust.
The Steerable Nozzle and Pivot Bearings
The primary hardware component for steering is the steerable nozzle, located at the rear of the jet pump. When the operator turns the handlebars, a series of linkages (or electronic actuators) pivots this nozzle left or right. The high-velocity stream of water exiting the pump is redirected, creating a lateral force that pushes the stern of the PWC in the opposite direction, thereby swinging the bow into the turn. The precision of this movement depends on high-grade pivot bearings and bushings that must withstand extreme water pressure and corrosive saltwater environments.
The Role of the Impeller and Wear Ring
While the nozzle directs the water, the impeller is the “engine” of steering. The efficiency of the steering response is directly tied to the tight tolerances between the impeller blades and the wear ring. From a technical perspective, if the wear ring is eroded, cavitation occurs—a phenomenon where vacuum bubbles form and collapse, causing a loss of thrust. In tech terms, this is a “system latency” issue; the operator inputs a command through the handlebars, but the hardware fails to provide the necessary force to execute the maneuver.
Sponsons and Hull Geometry
Steering control isn’t just about the nozzle; it’s about how the hull “bites” the water. Sponsons—fin-like attachments on the sides of the hull—act as lateral stabilizers. Modern PWC tech includes adjustable sponsons that allow riders to customize the turning radius and aggressiveness of the craft’s “grip,” much like adjusting the downforce on a high-performance sports car.
2. Digital Evolution: Fly-by-Wire and Electronic Control Units (ECU)
The transition from mechanical cable steering to electronic control has revolutionized the PWC industry. Modern flagship models from manufacturers like Sea-Doo (BRP), Yamaha, and Kawasaki now utilize “Fly-by-Wire” technology, where the physical connection between the handlebars and the jet pump is replaced by digital signals.
Intelligent Brake and Reverse (iBR) and RiDE Systems
One of the most significant breakthroughs in PWC steering tech is the integration of electronic braking and reversing systems. Sea-Doo’s iBR and Yamaha’s RiDE systems use an electronic gate that drops over the jet nozzle.
- The Tech Logic: The ECU processes rider input from the left-hand lever to deploy the gate, redirecting thrust forward to slow the craft down or backward to reverse.
- Enhanced Maneuverability: This technology allows for “neutral” steering, where the craft can stay stationary despite the engine running. In docking scenarios, the ECU manages minute adjustments in thrust, giving the rider surgical precision that was impossible with old-school mechanical levers.
Electronic Fuel Injection (EFI) Integration
Steering control is also linked to the engine’s throttle response. Modern ECUs use sophisticated algorithms to ensure that when a rider initiates a sharp turn, the EFI system maintains consistent RPMs. This prevents the engine from “bogging down” under the increased load of a high-G turn, ensuring that the thrust necessary for steering remains constant and predictable.
3. Safety Algorithms: Off-Throttle Steering (OTS) Solutions

The most dangerous technical limitation of early PWCs was the loss of steering when the throttle was released. Because steering requires thrust, a panicked beginner who let go of the throttle to avoid an obstacle would essentially lose the ability to turn. To solve this, engineers developed Off-Throttle Steering (OTS) technology.
Sensor-Based Intervention
OTS systems utilize a variety of sensors, including throttle position sensors (TPS) and steering angle sensors. When the ECU detects that the handlebars are turned to their limit while the throttle is closed, it identifies a “collision avoidance” scenario.
Automated Power Compensation
In response, the system automatically increases engine RPMs—even if the rider isn’t touching the throttle—to provide just enough jet thrust to initiate a turn. This “smart” intervention is a prime example of how software is being used to compensate for the physical limitations of jet propulsion, significantly reducing the risk of high-speed collisions.
4. Intelligent Trim and Hull Stabilization Tech
Steering control is heavily influenced by the “pitch” of the PWC. If the nose is too high (bow up), the craft will “hunt” or wander; if it is too low (bow down), the craft may “plug” or over-steer aggressively.
Variable Trim Systems (VTS)
The Variable Trim System is a motorized actuator that adjusts the vertical angle of the jet nozzle. High-tech VTS systems now include “Launch Control” and “Auto-Trim” features. From a technical standpoint, these systems use accelerometers and gyroscopes to determine the craft’s attitude relative to the water surface.
- Speed-Sensitive Adjustment: At high speeds, the tech automatically trims the nozzle up to reduce drag and increase top speed.
- Cornering Optimization: When the system senses a sharp steering input, it can automatically trim the nozzle down to plant the bow in the water, increasing the surface area of the hull’s “rails” and allowing for tighter, more controlled cornering.
Electronic Stability and T3-R Hull Tech
The latest innovations in hull design, such as Sea-Doo’s T3-R hull, use a “deep-V” architecture combined with “shark gills” to regulate water flow under the craft. These technical features work in tandem with the steering system to prevent “side-slip.” By managing the boundary layer of water against the hull, these designs ensure that steering inputs are translated into immediate directional changes without the craft skipping across the surface.
5. The Future: AI, GPS Integration, and Autonomous Systems
As we look toward the future of PWC steering control, the integration of digital gadgets and AI tools is becoming more prevalent. The PWC of tomorrow is not just a vehicle; it is a connected device.
GPS-Linked Steering Assist
Some high-end models are beginning to integrate GPS data into their steering logic. By knowing the craft’s exact speed over ground (rather than just water speed), the ECU can refine steering sensitivity. For instance, in “Slow Mode” or “No-Wake Zone” mode, the steering sensitivity can be electronically increased to compensate for the lack of high-speed water flow, making the craft easier to handle in tight marinas.
Collision Avoidance and Augmented Reality (AR)
We are seeing the early stages of sonar-based collision avoidance systems being adapted for PWC use. These gadgets scan the water for submerged objects or other vessels. If an imminent collision is detected, the steering tech could theoretically assist the rider by “heavying” the steering in the direction of the obstacle or providing an automated pulse of thrust to help veer away.
Smart Displays and Telemetry
Modern PWC cockpits now feature full-color LCD screens that provide real-time telemetry on steering angles, trim positions, and engine health. This data-driven approach allows riders to understand the “Tech Stack” of their craft, enabling them to tune their steering preferences—such as steering ratio and throttle mapping—through a digital interface, much like a modern gaming setup or a high-end electric vehicle.

Conclusion
Steering control on a PWC is a sophisticated discipline that far exceeds the simple turning of a handle. It is an intricate dance between jet propulsion physics, robust mechanical hardware, and cutting-edge software. From the nozzle vectoring that provides the raw force of a turn to the ECU algorithms that ensure safety through Off-Throttle Steering, technology is the silent partner in every maneuver. As AI and GPS integration continue to mature, the “steering” of a PWC will become even more intuitive, transforming these watercraft into the most technologically advanced personal vehicles on the water. For the enthusiast, understanding these systems is not just about maintenance—it’s about mastering the digital and physical forces that define the modern marine experience.
aViewFromTheCave is a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for sites to earn advertising fees by advertising and linking to Amazon.com. Amazon, the Amazon logo, AmazonSupply, and the AmazonSupply logo are trademarks of Amazon.com, Inc. or its affiliates. As an Amazon Associate we earn affiliate commissions from qualifying purchases.