In the contemporary landscape of automotive engineering, a vehicle is no longer just a mechanical assembly of gears and pistons; it is a sophisticated, mobile data center. When you see the letters “T/C” illuminated on your dashboard or mentioned in a vehicle’s technical specifications, you are looking at one of the most pivotal advancements in automotive safety technology: the Traction Control System.
As software continues to redefine the driving experience, T/C stands as a primary example of how sensor fusion and real-time processing work together to prevent accidents and optimize performance. This article explores the technical architecture, software logic, and the digital evolution of traction control systems in the modern era.
The Engineering Architecture of Traction Control
At its core, Traction Control is an active safety feature designed to prevent wheel slip on low-friction surfaces. While the concept of “not sliding” sounds simple, the technology required to execute this in milliseconds involves a complex network of hardware and software working in perfect synchronicity.
The Role of Wheel Speed Sensors
The foundation of any T/C system is the wheel speed sensor. These are digital transducers, typically Hall-effect sensors or inductive sensors, located at each wheel hub. They monitor the rotational speed of each tire with incredible precision. In a high-tech vehicle, these sensors send data pulses to the central processing unit hundreds of times per second. If one wheel begins to rotate significantly faster than the others—a clear indicator of a loss of grip—the system flags this anomaly as “wheel spin.”
The ECU: The Brain of the Operation
The Engine Control Unit (ECU) or a dedicated Electronic Control Module (ECM) serves as the “brain.” It receives the data streams from the wheel sensors and compares them against other telemetry, such as throttle position, steering angle, and vehicle speed. The software programmed into the ECU contains complex algorithms that determine the “threshold of slip.” Once that threshold is crossed, the ECU makes a split-second decision on how to intervene to regain traction.
Actuators and Hydraulic Modulators
The physical execution of the T/C command is handled by actuators and the hydraulic modulator. In modern vehicles, T/C is usually an extension of the Anti-lock Braking System (ABS). When the software detects a slip, it can trigger the hydraulic pump to apply brake pressure to the specific wheel that is spinning. This transfers torque to the wheels that still have grip, effectively managing the power distribution through digital intervention rather than purely mechanical means.
How the Software Governs Physics
The brilliance of T/C lies in its ability to manipulate the laws of physics through software logic. It isn’t just about “stopping” a slide; it is about modulating energy. There are two primary ways the software intervenes when it detects a loss of traction.
Algorithmic Detection of Wheel Slip
The software doesn’t just look for “spinning”; it looks for “differential speed.” On a dry road, all wheels should rotate at roughly the same speed (with slight variations during turns). The software uses a logic gate: If Wheel A > (Average of B, C, D) + X%, then Initiate Intervention. This mathematical approach allows the system to distinguish between a car accelerating quickly on a grippy surface and a car losing control on ice.
Interventions: Throttle Mapping vs. Braking
Modern tech-heavy cars use a multi-layered intervention strategy. First, the software may utilize “Drive-by-Wire” technology to electronically reduce the throttle, regardless of how hard the driver is pressing the gas pedal. By overriding the driver’s input, the ECU reduces the torque sent to the drive wheels.
If reducing power isn’t enough, the software then initiates “Brake Intervention.” By pulsing the brakes on the spinning wheel, the system mimics the effect of a limited-slip differential. This dual-layered approach—managing both the source of power (the engine) and the application of power (the wheels)—is a hallmark of sophisticated automotive software engineering.
Integration with Electronic Stability Control (ESC)
Traction Control is rarely a standalone system in modern tech suites. It is a vital component of Electronic Stability Control (ESC). While T/C focuses on longitudinal stability (acceleration and preventing wheel spin), ESC manages lateral stability (preventing skidding or fishtailing). The two systems share the same sensor array, creating a holistic digital safety net that monitors the vehicle’s “yaw rate” and “G-force” to ensure the car stays on its intended path.
The Evolution from Analog to AI-Driven Traction
The history of T/C reflects the broader trend in technology: the transition from mechanical hardware to software-defined functionality. Understanding where this tech came from helps illustrate why modern systems are so much more effective.
Early Mechanical Systems
Before the digital revolution, “traction control” was largely mechanical. Limited-slip differentials (LSD) used clutches and gears to balance power. While effective, these systems were “dumb”—they reacted to physical force but could not predict or adjust based on environmental data. They were heavy, expensive, and lacked the nuance required for high-speed safety.
Modern Software-Defined Traction
The current generation of T/C is “software-defined.” Because the system is governed by code, manufacturers can update and refine traction logic through firmware updates. For instance, a vehicle’s traction performance can be improved over time via Over-The-Air (OTA) updates, much like a smartphone’s operating system. This allows engineers to tweak the “aggressiveness” of the intervention based on real-world data collected from thousands of vehicles in the fleet.
AI and Predictive Traction in Electric Vehicles (EVs)
The most exciting frontier in T/C technology is found in Electric Vehicles. Because electric motors can adjust torque output almost instantly—far faster than an internal combustion engine—the T/C systems in EVs are incredibly precise.
Leading-edge manufacturers are now implementing AI and machine learning to create “predictive” traction systems. Instead of waiting for a wheel to slip, the AI analyzes road conditions, temperature, and even GPS data (knowing there is a sharp, potentially icy curve ahead) to preemptively adjust torque distribution. This is no longer just reactive safety; it is proactive computational driving.
When Technology Meets the Road: Real-World Applications
While the T/C light on the dash (often a symbol of a car with squiggly lines behind it) is a warning, it is also an indicator of a high-functioning digital assistant at work.
Navigating Low-Friction Surfaces
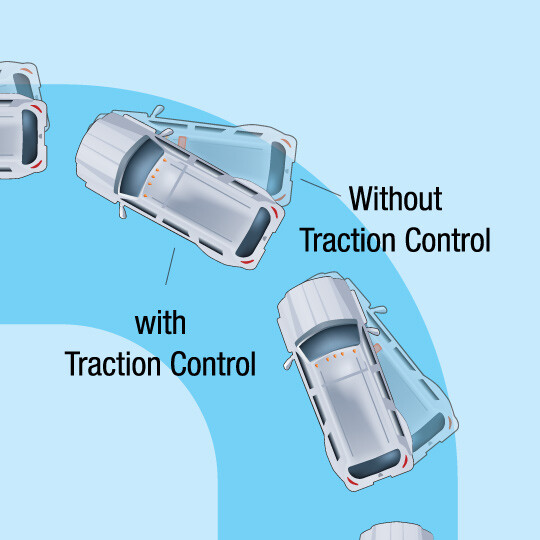
The most common application of T/C is in adverse weather—rain, snow, or gravel. In these scenarios, the software acts as a mediator between the driver’s intent and the road’s reality. Without T/C, an over-eager press of the accelerator on a wet road would result in the tires “hydroplaning” or spinning fruitlessly. The T/C system ensures that only the maximum amount of “usable” torque is delivered to the pavement, allowing the car to move forward safely.
Performance and “Track Mode” Programming
Traction control isn’t just for safety; it’s for speed. In high-performance sports cars, “Track Mode” recalibrates the T/C software. Instead of cutting power the moment a slip is detected, the software allows for a specific percentage of “slip angle.” This allows professional drivers to slide the car slightly through a corner to maintain momentum, while the technology remains in the background as a “fail-safe” to prevent a total loss of control. This demonstrates the versatility of the software: it can be a strict safety warden or a performance-enhancing partner.
Troubleshooting and Digital Diagnostics
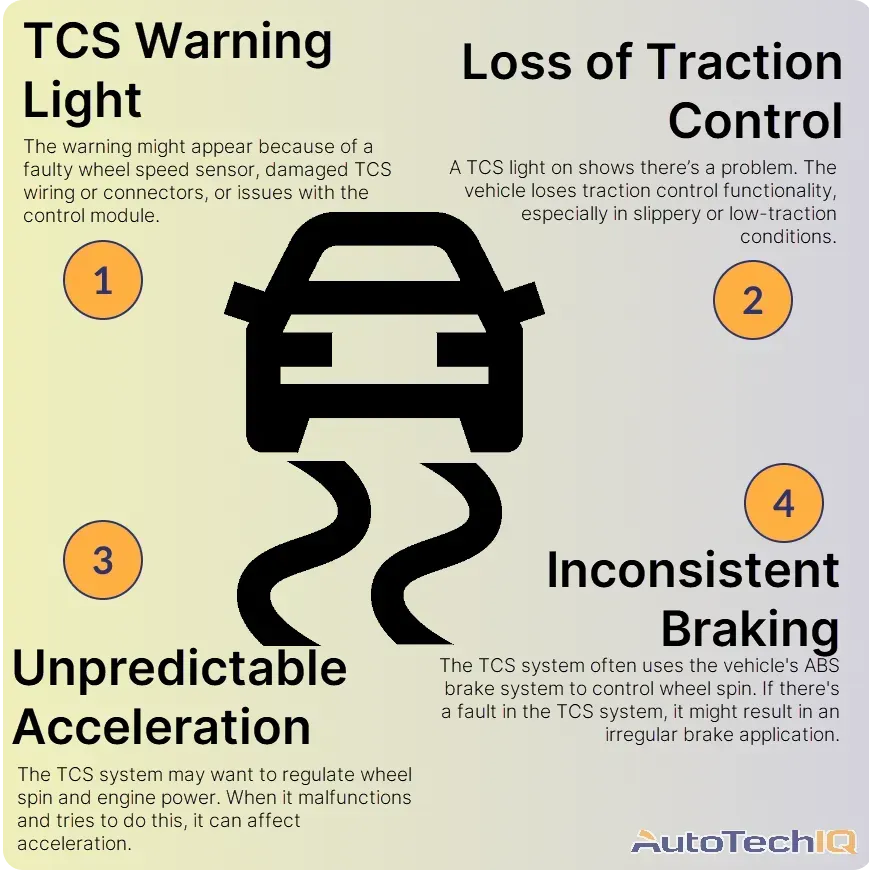
From a technical maintenance perspective, the T/C system is a goldmine of data. When the T/C light stays on permanently, it usually indicates a sensor failure or a communication error on the CAN bus (Controller Area Network). Technicians use OBD-II (On-Board Diagnostics) scanners to interface with the car’s software, pulling specific error codes that identify exactly which sensor is malfunctioning. This digital diagnostic capability has transformed auto repair from guesswork into a precise data-driven process.
The Future of T/C and Autonomous Systems
As we move toward a future of fully autonomous vehicles, the role of Traction Control will become even more integrated. In a self-driving car, the T/C system is not just an “assist” for a human; it is a fundamental input for the AI pilot. If the autonomous system cannot “feel” the road through traction sensors, it cannot safely navigate.
The “TC” on your car is a testament to the power of modern technology. It represents the intersection of mechanical engineering, computer science, and data physics. By turning the chaotic variables of a slippery road into a series of manageable data points, Traction Control has saved countless lives and paved the way for the intelligent, software-driven vehicles of tomorrow. Whether you are driving an economy hatchback or a high-end electric supercar, the T/C system is your silent, digital co-pilot, ensuring that every bit of power your engine produces is used as efficiently and safely as possible.
aViewFromTheCave is a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for sites to earn advertising fees by advertising and linking to Amazon.com. Amazon, the Amazon logo, AmazonSupply, and the AmazonSupply logo are trademarks of Amazon.com, Inc. or its affiliates. As an Amazon Associate we earn affiliate commissions from qualifying purchases.