In the rapidly evolving landscape of automotive engineering, the transition from purely mechanical systems to sophisticated, software-driven architecture has redefined how vehicles interact with the road. Among these innovations, Acura’s Super Handling All-Wheel Drive (SH-AWD) stands as a landmark achievement. While traditional all-wheel-drive systems were primarily designed for inclement weather and low-traction scenarios, SH-AWD was conceptualized through a different lens: the lens of performance technology and dynamic handling.
At its core, SH-AWD is an advanced torque-vectoring system that intelligently manages power distribution not just between the front and rear axles, but specifically between the left and right rear wheels. This deep dive explores the technical complexity, sensor integration, and software algorithms that make SH-AWD a cornerstone of modern automotive technology.
The Engineering Blueprint: How SH-AWD Redefines Drivetrain Mechanics
Traditional All-Wheel Drive (AWD) systems generally operate on a reactive basis. When a sensor detects wheel slip, the system redirects power to the wheels with the most grip. While effective for getting out of a snowy driveway, this mechanical “safety net” does little to improve the actual driving dynamics on dry pavement. SH-AWD disrupts this paradigm by utilizing a proactive engineering blueprint.
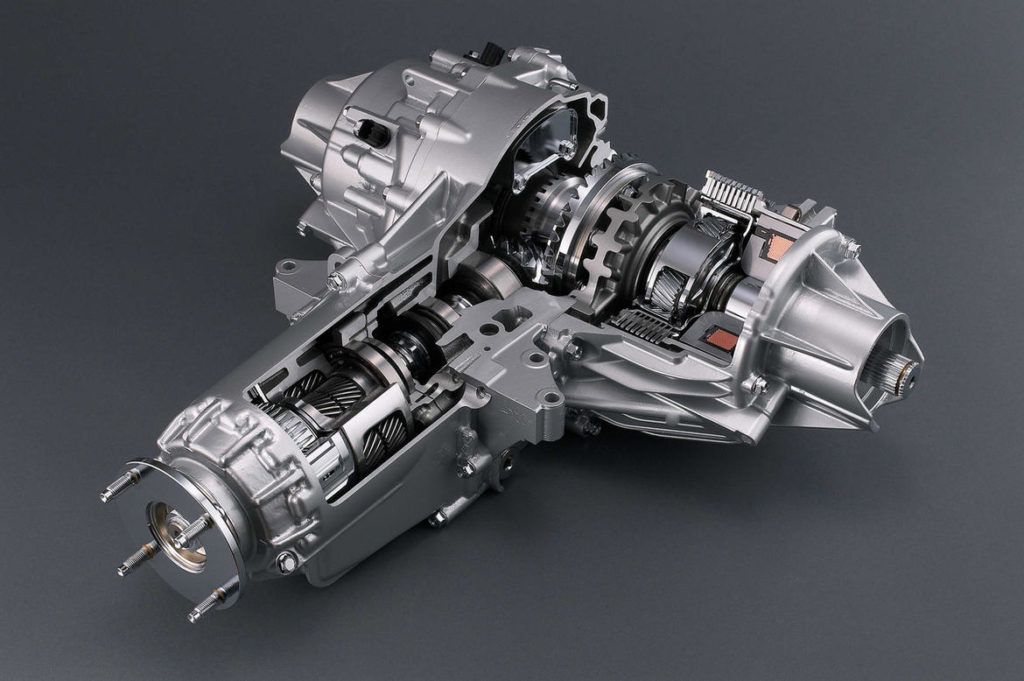
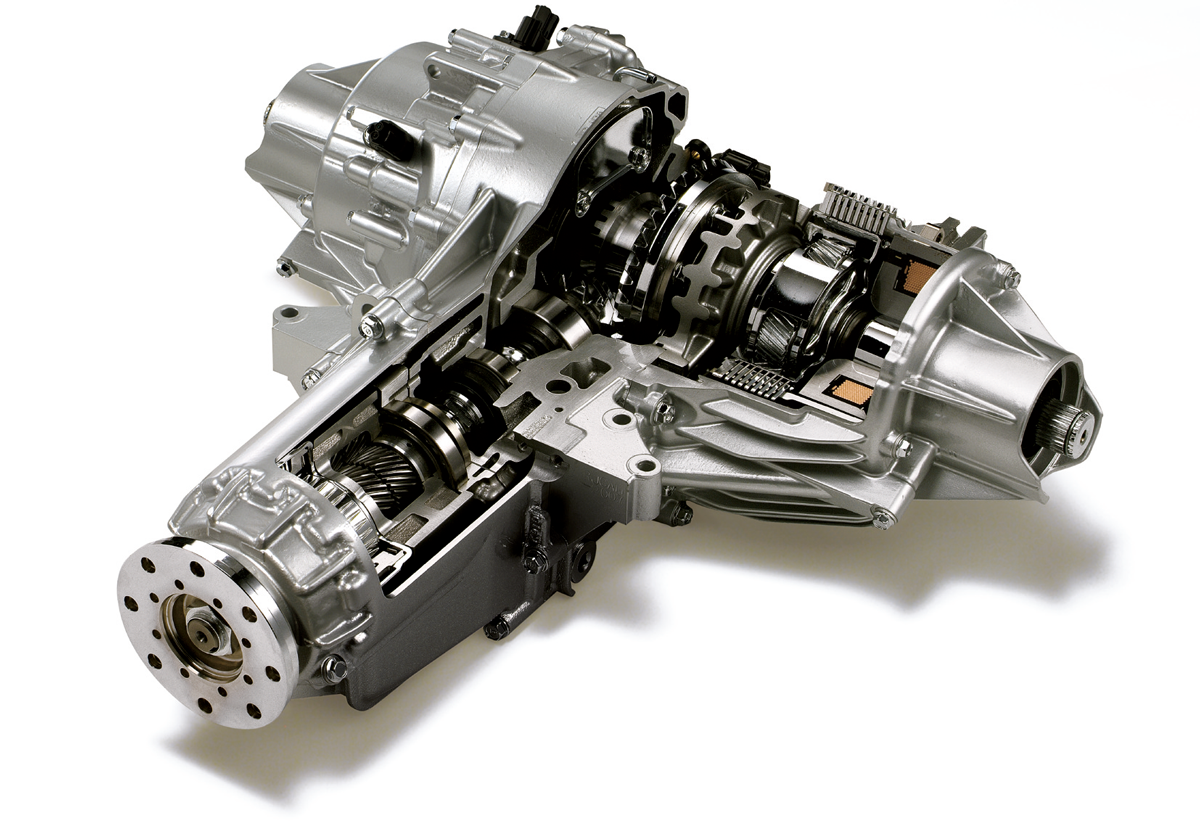
The Mechanics of the Rear Differential Unit
The heart of the SH-AWD system lies in its unique rear differential. Unlike a standard open or limited-slip differential, the SH-AWD rear unit houses two electromagnetic clutch packs. These clutches allow the system to decouple the rear wheels from one another entirely. By modulating the electrical current sent to these clutches, the vehicle’s onboard computer can dictate exactly how much torque each individual rear wheel receives. In its most modern iterations, the system can send up to 70% of total engine torque to the rear axle, and 100% of that available rear torque can be channeled to a single wheel.
Active Torque Distribution vs. Passive AWD Systems
The “Super Handling” moniker comes from the system’s ability to utilize torque to steer the car. In a passive system, all wheels rotate at roughly the same speed unless a slip occurs. In the SH-AWD tech stack, the system creates a “yaw moment.” During a turn, the system over-drives the outside rear wheel, spinning it slightly faster than the front wheels. This creates a physical force that pushes the rear of the vehicle around the corner, effectively neutralizing the physics of understeer. This is a mechanical solution managed by high-speed digital processing.
The Digital Brain: Sensor Fusion and Real-Time Data Processing
The mechanical hardware of SH-AWD is only as capable as the software that controls it. To function effectively, the system requires a massive influx of data from across the vehicle’s Controller Area Network (CAN bus). This integration of “Sensor Fusion” allows the SH-AWD Control Unit to make decisions in milliseconds—faster than a human driver can perceive a change in direction.
Integrating VSA and Engine Control Modules
SH-AWD does not operate in a vacuum. It is deeply integrated with the Vehicle Stability Assist (VSA) and the Engine Control Module (ECM). The system monitors parameters such as throttle position, gear ratio, wheel speed, and manifold pressure. If the ECM detects a high-load acceleration phase, the SH-AWD system preemptively shifts torque to the rear to prevent front-wheel spin before it even begins. This predictive capability is a hallmark of high-end automotive technology, moving away from “detect and react” toward “anticipate and execute.”
Predicting Driver Intent through Algorithm Analysis
Beyond just monitoring the car’s state, the SH-AWD software analyzes driver intent. By measuring the steering angle and the rate of change in that angle (yaw rate), the system determines how aggressively the driver is attempting to corner. If the sensors detect a sharp steering input combined with heavy throttle, the algorithms prioritize “lateral torque vectoring.” If the sensors detect a steady-state cruise on a highway, the software prioritizes efficiency by sending the majority of power to the front wheels, reducing mechanical drag and fuel consumption.
Performance Tech in Action: Improving Cornering and Stability
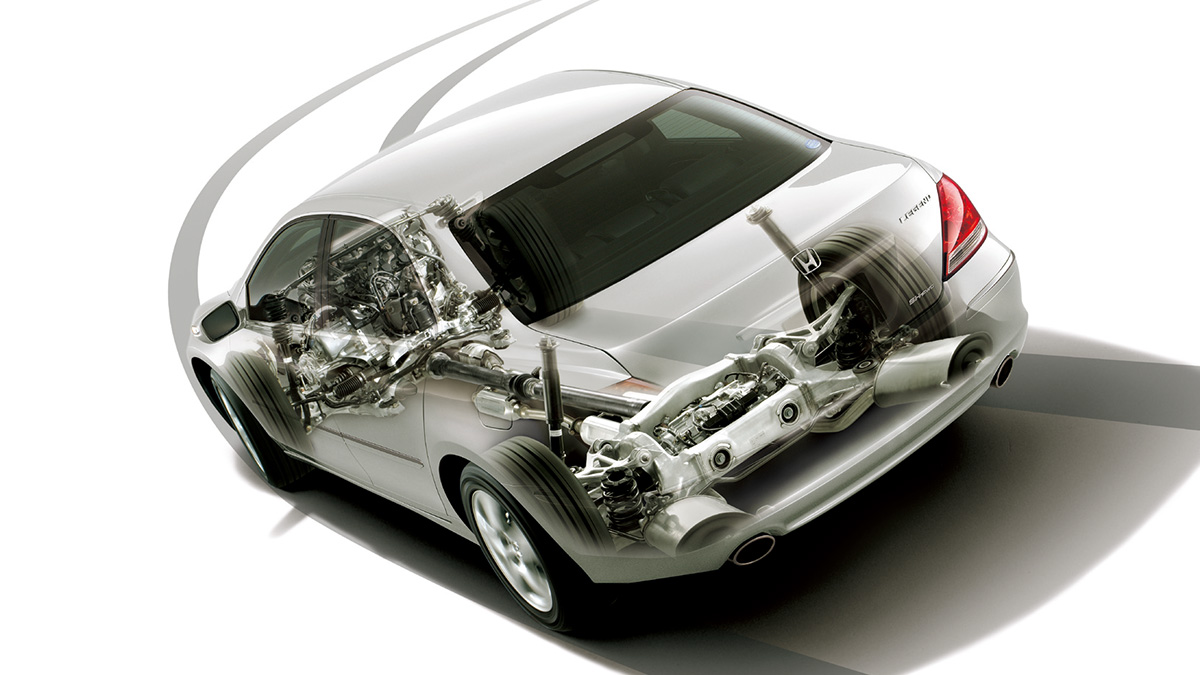
The technical brilliance of SH-AWD is most evident during high-performance maneuvers. In a standard vehicle, taking a corner too fast results in understeer—the tendency of the car to plow straight ahead despite the wheels being turned. SH-AWD uses technology to rewrite these laws of physics.
The Physics of “Super Handling”
When a vehicle enters a curve, the weight shifts toward the outside wheels. SH-AWD takes advantage of this weight transfer by increasing the torque sent to the outside rear wheel. Because that wheel has the most vertical load (and therefore the most grip), the system can apply significant power without breaking traction. This creates a pivot effect, much like the way a tank turns by moving one tread faster than the other. The result is a vehicle that feels smaller and more agile than its physical dimensions would suggest.
Overcoming Understeer through Power Allocation
Most front-biased AWD systems suffer from “power understeer” when exiting a corner under heavy throttle. The front wheels, tasked with both steering and pulling the car, become overwhelmed. SH-AWD alleviates this by shifting the “work” to the rear. By pushing the car through the apex using the rear outer wheel, the front tires are freed up to focus primarily on steering. This technological balance ensures that the vehicle maintains its intended line even under extreme lateral G-forces.
The Evolution of SH-AWD: From Mechanical to Hybrid-Electric
As the automotive industry pivots toward electrification, the SH-AWD system has evolved from a purely mechanical-linkage system to a sophisticated “Sport Hybrid” configuration. This represents one of the most significant leaps in drivetrain tech over the last decade, famously showcased in the Acura NSX and the MDX Sport Hybrid.
The Shift to Twin Motor Units (TMU)
In the Sport Hybrid version of SH-AWD, the traditional mechanical driveshaft and rear differential are replaced by a Twin Motor Unit (TMU). This unit consists of two independent electric motors, one for each rear wheel. Because electric motors can deliver maximum torque instantly, the “vectoring” effect is even more precise. There is no waiting for a clutch to engage or for a driveshaft to rotate; the software simply instructs the electric motor to apply positive or negative torque to a specific wheel.
Regenerative Braking and Efficiency Gains
The tech integration in the hybrid system adds a layer of “Negative Torque Vectoring.” While one electric motor can apply power to the outside wheel to help it turn, the motor on the inside wheel can simultaneously apply regenerative braking. This not only helps rotate the car even more sharply but also captures the kinetic energy and stores it back in the battery. This synergy between performance and efficiency is the pinnacle of current drivetrain software.
Future-Proofing the Drivetrain: The Road to Electrification
As we look toward a future dominated by Battery Electric Vehicles (BEVs), the principles pioneered by SH-AWD are more relevant than ever. The transition from internal combustion engines to multi-motor electric setups allows for even more granular control of vehicle dynamics.
Seamless Integration with Electric Vehicle Platforms
In a fully electric landscape, the “All-Wheel Drive” designation becomes less about gears and shafts and more about software-defined power delivery. Future iterations of SH-AWD in electric SUVs and sedans will likely utilize four-motor setups—one at each wheel. The lessons learned from twenty years of SH-AWD software development will allow engineers to create “Virtual SH-AWD,” where software mimics the handling characteristics of the mechanical system but with the near-infinite adjustability of digital motor controllers.
The Next Frontier of Dynamic Vectoring
The next frontier for this technology is its integration with autonomous driving suites and Artificial Intelligence. By combining SH-AWD’s torque vectoring with ADAS (Advanced Driver Assistance Systems), vehicles can theoretically perform emergency maneuvers—such as swerving to avoid an obstacle—with a level of stability that a human driver could never achieve. The technology isn’t just about going faster around a track; it’s about using high-speed computing to ensure the vehicle remains on its intended path regardless of external conditions.
In conclusion, SH-AWD is far more than a marketing acronym. It represents a sophisticated intersection of mechanical engineering and digital intelligence. By prioritizing torque vectoring as a tool for both safety and performance, the system has set a high bar for what enthusiasts and tech-forward consumers expect from a modern drivetrain. Whether through electromagnetic clutches or high-output electric motors, the mission of SH-AWD remains the same: to use technology to master the physics of the road.
aViewFromTheCave is a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for sites to earn advertising fees by advertising and linking to Amazon.com. Amazon, the Amazon logo, AmazonSupply, and the AmazonSupply logo are trademarks of Amazon.com, Inc. or its affiliates. As an Amazon Associate we earn affiliate commissions from qualifying purchases.